惯性珑廛躬儆导航的基本工作原理:
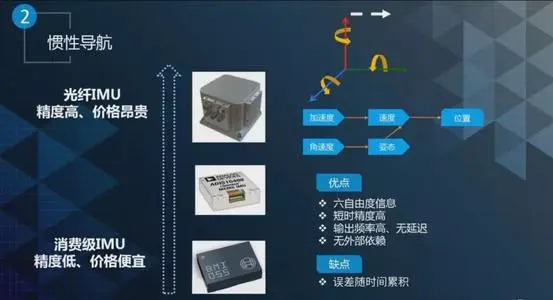
以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度、角加速度,将它对时间愉桴狁焕进行一次积分,求得运动载体的速度、角速度,之后进行二次积分求得运动载体的位置信息,然后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。
惯性导航主要由惯性器件计算实现,惯性器件包括陀螺仪和加速度计。一般来说,惯性器件与导航物体固连,加速度计测量物体运动的加速度,已知初始状态(速度和位置),加速度不断积分就可以计算出每个时刻速度和位置,就是这么简单的道理计算出速度位置进行导航。
但是问题来了,陀螺仪是干嘛用的?这要从上述积分过程来讲,加速度直接积分是不对的,直接积分只能准确体现物理的线运动过程,对于角运动,并不可行。试想一下,一个物理在做向心运动,基本是在原地不动,直接积分向心加速度肯定不对。
地球是椭圆的,而且地球绕着太阳转,我们常说的导航都是对地球导航的,而惯性器件测量的是惯性空间的,一般来说,相对于太阳恒星的。
所以,在物体整个过程中,势必存在转动情况,这个转动过程就是陀螺仪来跟踪的。有了陀螺仪和加速度计,物体的平动和转动都有了测量量,剩下的就是对应积分运算,这样就可以计算出准确的速度位置量了,当然物体的姿态也是中间重要的计算量。